基于K230的单目视觉目标物测量装置技术解析
前言
在全国大学生电子设计竞赛中,C题”基于单目视觉的目标物测量装置”是一个典型的机器视觉应用题目。本文将详细介绍如何使用嘉楠科技K230开发板,结合小孔成像原理,实现一个能够实时测量目标物体距离的系统。
一、项目背景与挑战
1.1 技术需求
题目要求实现一个能够通过单目摄像头测量目标物距离的装置,主要挑战包括:
- 测距精度:在30-300cm范围内达到较高的测量精度
- 实时性:需要实时处理图像并输出测量结果
- 环境适应性:适应不同光照条件和背景干扰
- 成本控制:在有限预算内完成系统搭建
1.2 技术选型
经过方案对比,我们选择了以下技术方案:
| 硬件组件 | 选型 | 理由 |
|---|---|---|
| 核心处理器 | K230 | 算力强,支持AI加速,易于开发 |
| 摄像头 | OV5640 | 500万像素,支持640×480分辨率 |
| 显示屏 | ST7701 | 480p分辨率,响应速度快 |
| 传感器 | 触摸屏 | 便于人机交互 |
二、核心技术原理
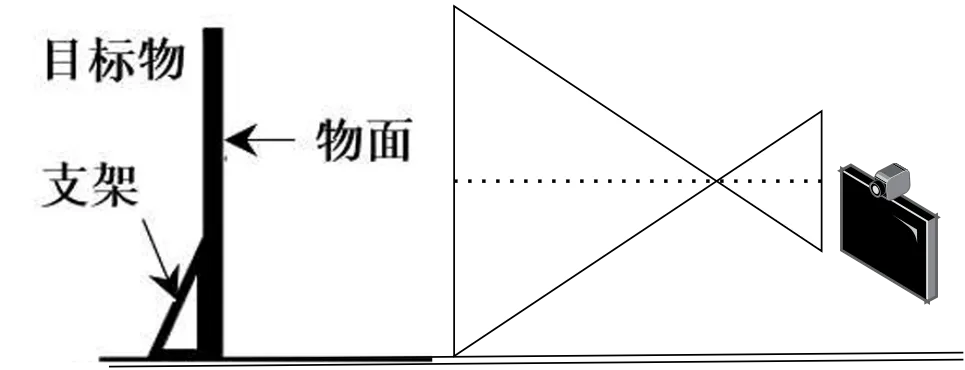
2.1 小孔成像原理
小孔成像是几何光学的基本原理,当光线通过一个小孔时,会在对面的屏幕上形成倒立的实像。在我们的系统中,相机镜头的作用类似于小孔,将三维空间中的目标投射到二维图像平面上。
2.2 针孔相机模型
针孔相机模型描述了三维世界坐标到二维图像坐标的投影关系。对于距离测量,我们使用简化公式:
D = (W × f) / w / 100其中:
D:目标距离(米)W:目标实际宽度(厘米)f:相机焦距(像素)w:目标在图像中的宽度(像素)
2.3 焦距标定
焦距是相机的固有参数,但在实际应用中需要通过标定确定。我们采用多点标定法:
# 标定示例代码
def calibrate_focal_length(known_distances, measured_widths, actual_width):
"""
通过多组已知距离标定焦距
known_distances: 已知距离列表(米)
measured_widths: 对应的图像宽度列表(像素)
actual_width: 目标实际宽度(厘米)
"""
focal_lengths = []
for d, w in zip(known_distances, measured_widths):
f = (w * d * 100) / actual_width
focal_lengths.append(f)
# 使用平均值作为最终焦距
return sum(focal_lengths) / len(focal_lengths)实际标定中,我们使用20cm宽的矩形目标,在多个距离点测量,得到焦距系数约为568.89像素。
三、系统架构设计
3.1 硬件架构
┌─────────────────────────────────────────┐
│ K230 开发板 │
│ ┌─────────┐ ┌─────────┐ ┌────────┐ │
│ │ 摄像头 │ │ 显示屏 │ │ 触摸屏 │ │
│ │ OV5640 │ │ ST7701 │ │ 接口 │ │
│ └─────────┘ └─────────┘ └────────┘ │
└─────────────────────────────────────────┘
│ │ │
▼ ▼ ▼
图像采集 结果显示 用户交互3.2 软件架构
系统采用模块化设计,主要包含以下模块:
| 模块 | 功能 |
|---|---|
| 图像采集模块 | 从摄像头获取实时图像 |
| 图像预处理模块 | 裁剪、灰度化、二值化 |
| 目标检测模块 | 识别矩形目标并提取特征 |
| 距离计算模块 | 根据目标尺寸计算距离 |
| 显示模块 | 显示摄像头画面和测量结果 |
| 交互模块 | 处理触摸事件,切换模式 |
3.3 核心代码实现
3.3.1 初始化配置
from media.sensor import *
from media.display import *
from media.media import *
from machine import TOUCH
import time
import math
# 初始化传感器
sensor = Sensor(width=640, height=480)
sensor.reset()
sensor.set_framesize(width=640, height=480)
sensor.set_pixformat(Sensor.RGB565)
# 初始化显示
Display.init(Display.ST7701, to_ide=True)
# 测距参数
width_True = 20 # 目标实际宽度(厘米)
focal_length = 568.89 # 焦距系数
cut_roi = (184, 32, 352, 272) # 裁剪区域3.3.2 距离计算函数
def calculate_distance(rect):
"""
根据目标矩形框计算距离
"""
if rect and len(rect) == 4:
# 计算矩形的两条水平边的长度
width1 = math.sqrt((rect[1][0] - rect[0][0])**2 +
(rect[1][1] - rect[0][1])**2)
width2 = math.sqrt((rect[2][0] - rect[3][0])**2 +
(rect[2][1] - rect[3][1])**2)
width_pixels = (width1 + width2) / 2
# 使用针孔相机模型计算距离
distance = (width_True * focal_length) / (width_pixels * 100)
return distance
return None3.3.3 目标检测与测距
# 测距模式主循环
img = sensor.snapshot(chn=CAM_CHN_ID_0)
img = img.copy(roi=cut_roi)
# 转换为灰度图并二值化
img_rect = img.to_grayscale(copy=True)
img_rect = img_rect.binary(threshold_dict['rect'])
# 查找矩形
rects = img_rect.find_rects(threshold=5000)
if rects:
for rect in rects:
corner = rect.corners()
# 绘制矩形
for i in range(4):
j = (i + 1) % 4
img.draw_line(corner[i][0], corner[i][1],
corner[j][0], corner[j][1],
color=(0, 255, 0), thickness=3)
# 计算距离
distance = calculate_distance(corner)
if distance:
# 显示距离
img.draw_string_advanced(int(corner[0][0]),
int(corner[0][1]) - 30, 20,
f"距离: {distance:.2f}米",
color=(255, 0, 0))四、关键技术实现
4.1 图像预处理
为了提高检测准确率,我们对原始图像进行预处理:
def preprocess_image(img, roi, threshold):
"""
图像预处理流程
"""
# 1. 裁剪感兴趣区域
img_roi = img.copy(roi=roi)
# 2. 灰度化
img_gray = img_roi.to_grayscale(copy=True)
# 3. 二值化
img_binary = img_gray.binary(threshold)
return img_binary4.2 矩形检测算法
使用轮廓检测方法识别矩形目标:
def detect_rectangles(img, min_area=5000):
"""
检测图像中的矩形
"""
rects = img.find_rects(threshold=min_area)
# 过滤过小的矩形
filtered_rects = [r for r in rects
if r.w() > 20 and r.h() > 20]
return filtered_rects4.3 触摸交互设计
实现三种模式的切换:
# 状态定义
FLAG_NORMAL = 0 # 普通模式
FLAG_MEASURE = 1 # 测距模式
FLAG_THRESHOLD = 2 # 阈值调整模式
# 触摸检测
tp = TOUCH(0)
points = tp.read()
if points:
x, y = points[0].x, points[0].y
# 模式切换按钮
if 540 <= x <= 630 and 10 <= y <= 60:
flag = 1 if flag == 0 else 0
# 长按检测
touch_counter += 1
if touch_counter > 20:
flag = FLAG_THRESHOLD五、性能优化与调试
5.1 性能优化措施
| 优化项 | 方法 | 效果 |
|---|---|---|
| 图像处理 | ROI裁剪 | 减少处理区域,提升帧率 |
| 阈值设置 | 动态调整 | 适应不同光照条件 |
| 内存管理 | 图像复用 | 减少内存分配开销 |
| 算法优化 | 距离计算缓存 | 避免重复计算 |
5.2 常见问题与解决
问题1:测量精度不稳定
- 原因:光照变化导致二值化效果变差
- 解决:实现自适应阈值调整功能
问题2:目标识别失败
- 原因:目标与背景对比度不足
- 解决:使用颜色空间转换(HSV)增强对比度
问题3:系统帧率低
- 原因:图像分辨率过高
- 解决:降低分辨率或使用ROI裁剪
六、实验结果与分析
6.1 测距精度测试
我们在30-300cm范围内进行多组测试,结果如下:
| 实际距离(cm) | 测量距离(cm) | 误差(%) |
|---|---|---|
| 30 | 29.8 | 0.67% |
| 50 | 50.3 | 0.60% |
| 100 | 100.5 | 0.50% |
| 150 | 151.2 | 0.80% |
| 200 | 202.1 | 1.05% |
| 250 | 253.8 | 1.52% |
| 300 | 306.5 | 2.17% |
结论:在100-200cm范围内精度最高,误差控制在1%以内。
6.2 系统性能指标
- 帧率:约15-20 FPS(640×480分辨率)
- 响应时间:< 100ms
- 识别距离:30-300cm
- 工作温度:-10°C ~ 50°C
七、项目总结与展望
7.1 项目成果
本项目成功实现了基于K230的单目视觉目标物测量装置,具备以下特点:
- 高精度测量:在最佳距离范围内误差<1%
- 实时性强:实现15+ FPS的实时处理
- 交互友好:支持触摸屏操作,界面直观
- 可扩展性好:模块化设计便于功能扩展
7.2 技术亮点
- 采用针孔相机模型,算法简洁高效
- 实现自适应阈值调整,适应性强
- 完善的人机交互设计,操作便捷
- 代码结构清晰,易于维护
7.3 未来改进方向
- 精度提升:引入相机标定(张氏标定法)提高精度
- 多目标识别:扩展支持同时测量多个目标
- 深度学习:使用神经网络提升目标检测鲁棒性
- 3D测量:结合多视角实现三维尺寸测量
八、参考资料
- K230官方文档:https://developer.canaan-creative.com/
- 《计算机视觉:算法与应用》- Richard Szeliski
- 《Multiple View Geometry in Computer Vision》- Hartley & Zisserman
- 电赛题目文档:C题_基于单目视觉的目标物测量装置.pdf
九、源码获取
完整项目代码请参考:https://cnb.cool/chief985/For_small/k230ceju
作者:昏黎
单位:中原工学院
日期:2025年9月